Quadrotor Controller for UAV Capture 🚁
Developed a control system for a quadrotor tasked with autonomously monitoring a restricted airspace, detecting intrusions, following, capturing an unidentified UAV, and returning to its base. This project leverages a simulator to model quadrotor dynamics and test control algorithms.
🔍 Project Overview
- Designed a robust controller for a quadrotor with the goal of detecting, pursuing, capturing, and returning after intercepting an intruding UAV in a controlled airspace.
- The simulator enables testing and optimization of control algorithms under various conditions, providing an essential platform for real-time response testing and environmental adaptability.
🎯 Control System Design
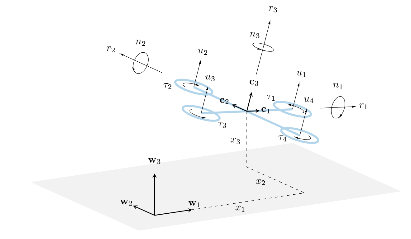
The quadrotor’s control system is based on an LQR (Linear-Quadratic Regulator) framework that minimizes deviations in position and orientation while managing energy efficiency. Euler angles are used to represent the quadrotor’s orientation, allowing for precise control adjustments.
- Position Control: Ensures accurate detection and tracking of the UAV’s position within the airspace.
- Orientation Control: Maintains the quadrotor’s stability during pursuit and capture operations.
- Dynamic Adjustments: The controller dynamically adjusts priorities between position, velocity, and orientation based on proximity to the target UAV.
💻 Simulator Features
The quadrotor simulator offers several key features that support the development and refinement of control algorithms:
- Quadrotor Dynamics Simulation: Models the quadrotor's response to control inputs using Euler angles.
- UAV Intrusion Scenario Setup: Creates a test environment for UAV detection and capture missions.
- Customizable Parameters: Allows for tuning of control parameters to optimize performance and robustness under various conditions.
📐 System Diagram
🎓 Conclusion
The Quadrotor Controller for UAV Capture project successfully demonstrates the integration of advanced control algorithms within a simulated environment, enabling safe and effective UAV interception and return-to-base operations. This simulator facilitates further research and development in autonomous airspace monitoring and defense applications.